
Egyik kollégám teljesen megalapozottan csak „Magyarország leggyakrabban drónozott templomaként” hivatkozott a Somogyvámos határában álló Pusztatemplomra. Nem véletlenül örvend ekkora népszerűségnek: a légtérszerkezet szempontjából ideális helyen fekszik, semmilyen állandó korlátozás nem nehezíti a repülést. Néhány éve jártam már arra, ám akkor még csak pár futó légifotót készítettem. Nemrég viszont tudatosabb szándékkal vezetett oda az utam: a DJI Mini helyett ezúttal egy komolyabb, kifejezetten fotós/videós platformot, egy DJI Mavic 3 Prót vittem magammal. A cél egy nagyfelbontású 3D modell előállítása volt. Mivel ez a típus nem az ipari (Enterprise) kategóriába tartozik, a szoftveres, automatizált repüléstervezés nem elérhető hozzá. Pontosan ez adta a kísérlet lényegét: kíváncsi voltam, milyen minőségű eredményt lehet elérni tisztán manuális repüléssel és kézi adatgyűjtéssel.


Milyen szempontoknak kell megfelelnünk, ha centiméteres pontosságú, mérhető adatot szeretnénk kapni? Minden fotogrammetriai felmérés kulcsparamétere az egymást követő képek közötti átfedés – és valójában ez jelentette a legnagyobb kihívást ebben a projektben is. Automatizált repülésnél ezt a repüléstervező szoftverek maguktól kiszámolják és tartják, manuális vezérlésnél viszont a pilótára hárul ez a feladat. Szerencsére a Mavic 3 Pro beállításai között elérhető az intervallumfotó (bizonyos időközönkénti automatikus exponálás), így a képek sűrűsége helyett „csupán” a megfelelő repülési útvonal és a stabil sebesség fenntartására kellett koncentrálnom.


Az alábbi ábrákon jól látható, pontosan hol készültek a felvételek – a teljes adatgyűjtés során összesen 533 fotót rögzítettem. A szakirodalom szerint a megbízható feldolgozáshoz a hossz- és keresztirányú átfedésnek is el kell érnie a minimum 60–65%-ot. Ezt a kézi vezérlés miatt helyenként biztosan jócskán túlléptem. Ráadásul a templomrom beugróinál, tagozatainál és kiálló részeinél manuálisan változtattam a kamera dőlésszögén (gimbal pitch), így előfordult, hogy egyazon pozícióból több kép is készült. Ezzel garantáltam, hogy a textúra és a geometria egyetlen rejtett zugban se vesszen el – ezt a komplex folyamatot a legújabb ipari drónok egyébként Smart Oblique néven már teljesen automatikusan végzik.
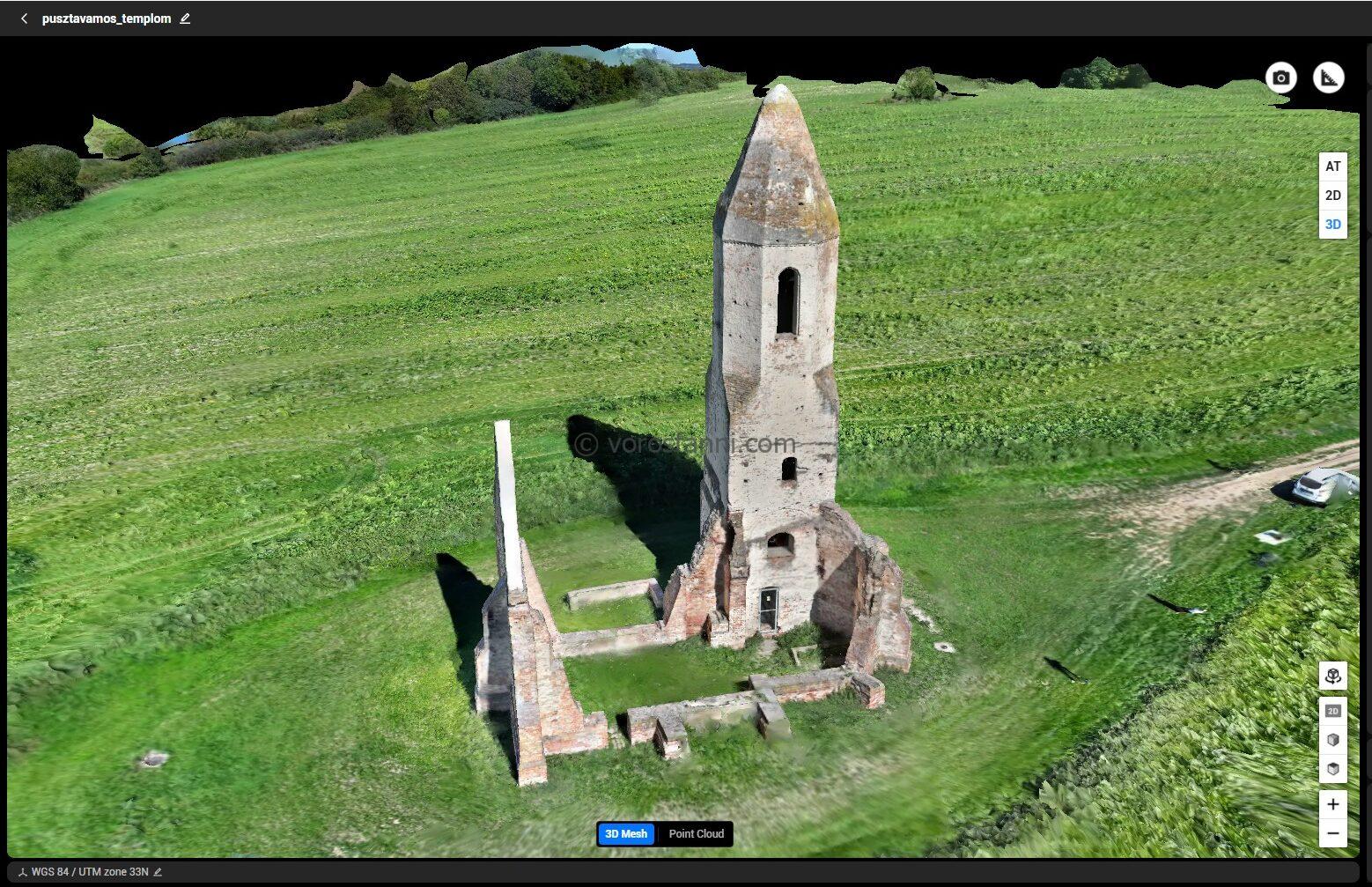

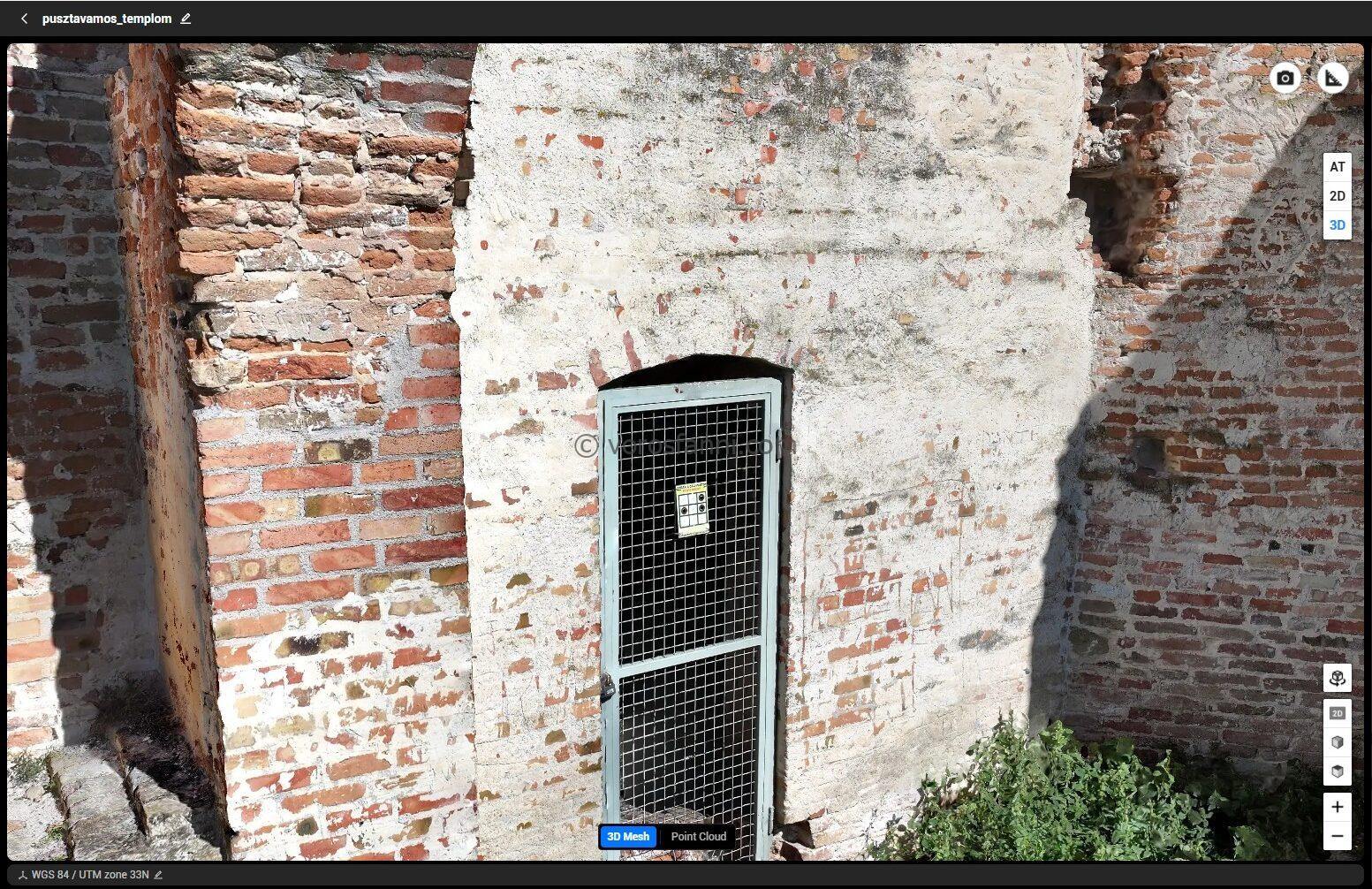


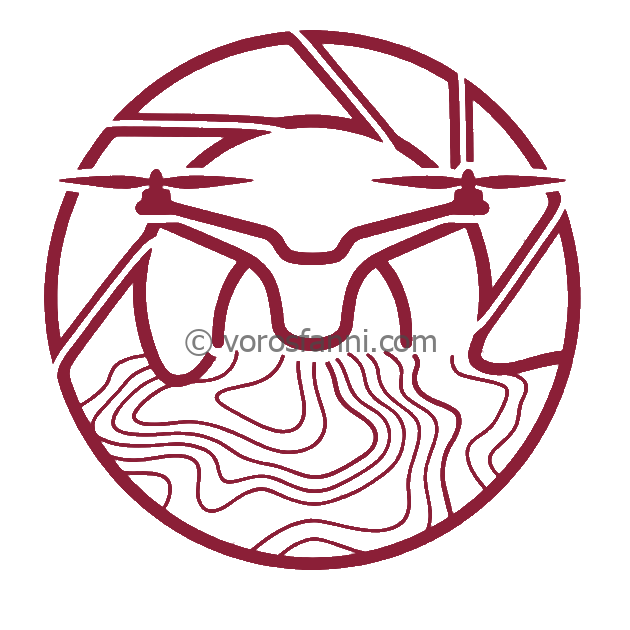
A feldolgozószoftverből kinyert eredmények (és a fenti képek) önmagukért beszélnek: a DJI Mavic 3 Próval, tisztán manuális adatgyűjtéssel is egy elképesztően részletgazdag, centis felbontású és látványos 3D modellt sikerült előállítani. A kísérlet bizonyította, hogy ha a pilóta ismeri a fotogrammetria alapszabályait (például a megfelelő átfedést és a kameraszögek változtatását), az enterprise szoftverek hiánya nem jelenthet akadályt egy-egy ikonikus épület digitalizálásában. Ugyanakkor látni kell az érem másik oldalát is: a manuális repülés hatalmas koncentrációt igényel, és lényegesen több időt (valamint több felvételt) vesz igénybe, mint egy gombnyomásra induló automatizált küldetés. Kisebb objektumoknál vagy egyedi projekteknél – mint amilyen a Pusztatemplom is volt – ez egy fantasztikus és működőképes alternatíva, de nagyobb kiterjedésű területeknél vagy ipari felméréseknél az automatizáció továbbra is verhetetlen.